






 编辑
编辑1工作原理
当向三相定子绕组中通入对称的三相交流电时,就产生了一个以同步转速n1沿定子和转子内圆空间作顺时针方向旋转的旋转磁场。由于旋转磁场以n1转速旋转,转子导体开始时是静止的,故转子导体将切割定子旋转磁场而产生感应电动势(感应电动势的方向用右手定则判定)。由于转子导体两端被短路环短接,在感应电动势的作用下,转子导体中将产生与感应电动势方向基本一致的感生电流。转子的载流导体在定子磁场中受到电磁力的作用(力的方向用左手定则判定)。电磁力对转子轴产生电磁转矩,驱动转子沿着旋转磁场方向旋转。
通过上述分析可以总结出电动机工作原理为:当电动机的三相定子绕组(各相差120度电角度),通入三相对称交流电后,将产生一个旋转磁场,该旋转磁场切割转子绕组,从而在转子绕组中产生感应电流(转子绕组是闭合通路),载流的转子导体在定子旋转磁场作用下将产生电磁力,从而在电机转轴上形成电磁转矩,驱动电动机旋转,并且电机旋转方向与旋转磁场方向相同。
交流三相异步电动机绕组分类:
单层绕组:
单层绕组就是在每个定子槽内只嵌置一个线圈有效边的绕组,因而它的线圈总数只有电机总槽数的一半。单层绕组的优点是绕组线圈数少工艺比较简单;没有层间绝缘故槽的利用率提高;单层结构不会发生相间击穿故障等。缺点则是绕组产生的电磁波形不够理想,电机的铁损和噪音都较大且起动性能也稍差,故单层绕组一般只用于小容量异步电动机中。单层绕组按照其线圈的形状和端接部分排列布置的不同,可分为链式绕组、交叉链式绕组、同心式绕组和交叉式同心绕组等几种绕组形式。
1、链式绕组
链式绕组是由具有相同形状和宽度的单层线圈元件所组成,因其绕组端部各个线圈像套起的链环一样而得名。单层链式绕组应特别注意的是其线圈节距必须为奇数,否则该绕组将无法排列布置。
2、交叉链式绕组
交叉链式绕组当每极每相槽数9为大于2的奇数时链式绕组将无法排列布置,此时就需要采用具有单、双线圈的交叉式绕组。
3、同心式绕组
同心式绕组在同一极相组内的所有线圈围抱同一圆心。
4、交叉式同心式绕组
当每级每相槽数Q为大于2的偶数时则可采取同心式绕组的形式。
单层同心绕组和交叉同心式绕组的优点为绕组的绕线、嵌线较为简单,缺点则为线圈端部过长耗用导线过多。现除偶有用在小容量2极、4极电动机中以外,如今已很少采用这种绕组形式。
双层叠式绕组
单双层混合绕组
星接与角接的关系
星接改角接:原星接时线径总截面积除以1.732等于角接时的线径总截面积。
角接改星接:原角接时线径总截面积乘以1.732等于星接时的线径总截面积。
星接与角接本质上的区别
星接时线电压等于相电压的1.732倍,相电流等于线电流。
角接时相电压等于线电压,线电流等于相电流的1.732倍。
同功率的电机,星接时,线径粗,匝数少,角接时,线径细,匝数多。
角接时的截面积是星接时的0.58倍。(即角接时线径总截面积除以0.58等于星接时的线径总截面积。星接时线径总截面积乘以0.58等于角接时的线径总截面积)
线径截面积计算公式:截面积S=直径的平方乘以0.785
电机的内部连接有显极和庶极之分,显极和庶极连接是由电机的设计属性决定的,是不能更改的
电动机空载电流计算系数
四极、六极功率因数0.85-0.98.5
功率因数0.85,效率0.85时系数为:0.435,乘以额定电流
功率因数0.86,效率0.86时系数为:0.393,乘以额定电流
功率因数0.87,效率0.87时系数为:0.353,乘以额定电流
功率因数0.88,效率0.88时系数为:0.313,乘以额定电流
功率因数0.89,效率0.89时系数为:0.276,乘以额定电流
功率因数0.90,效率0.90时系数为:0.240,乘以额定电流
功率因数0.91,效率0.91时系数为:0.205,乘以额定电流
功率因数0.92,效率0.92时系数为:0.172,乘以额定电流
功率因数0.93,效率0.93时系数为:0.142,乘以额定电流
功率因数0.94,效率0.94时系数为:0.113,乘以额定电流
功率因数0.95,效率0.95时系数为:0.086,乘以额定电流
功率因数0.96,效率0.96时系数为:0.062,乘以额定电流
功率因数0.97,效率0.97时系数为:0.040,乘以额定电流
功率因数0.98,效率0.98时系数为:0.022,乘以额定电流
功率因数0.99,效率0.99时系数为:0.008,乘以额定电流
四极、六极、八极功率因数0.81-0.85
功率因数0.81,效率0.81时系数为:0.468,乘以额定电流
功率因数0.82,效率0.82时系数为:0.433,乘以额定电流
功率因数0.83,效率0.83时系数为:0.398,乘以额定电流
功率因数0.84,效率0.84时系数为:0.365,乘以额定电流
功率因数0.85,效率0.85时系数为:0.332,乘以额定电流
四极、六极、八极功率因数0.70-0.80
功率因数0.70,效率0.70时系数为:0.728,乘以额定电流
功率因数0.71,效率0.71时系数为:0.694,乘以额定电流
功率因数0.72,效率0.72时系数为:0.661,乘以额定电流
功率因数0.73,效率0.73时系数为:0.630,乘以额定电流
功率因数0.74,效率0.74时系数为:0.595,乘以额定电流
功率因数0.75,效率0.75时系数为:0.562,乘以额定电流
功率因数0.76,效率0.76时系数为:0.530,乘以额定电流
功率因数0.77,效率0.77时系数为:0.499,乘以额定电流
功率因数0.78,效率0.78时系数为:0.468,乘以额定电流
功率因数0.79,效率0.79时系数为:0.438,乘以额定电流
功率因数0.80,效率0.80时系数为:0.408,乘以额定电流
六极、八极功率因数0.75
功率因数0.75,效率0.75时系数为:0.496,乘以额定电流
连体半密封的电机定子铁芯拆出:用加热的方法,把定子壳反过来放下面悬空,加热定子外壳当温度达到一定温度时轻轻震一震自己就出来了。
运行:
电动机应妥善接地,接线盒内右下方有接地螺钉,必要时也可
 图1
利用电动机的底脚或法兰盘固定螺栓接地。
图1
利用电动机的底脚或法兰盘固定螺栓接地。
图1
电动机铭牌上有规定的星形联结和三角形联结,我国3kW以下电动机采用星形联结,3kW以上电动机采用三角形联结,不能接错。
电动机一般应配有故障保护装置,如热保护装置、电动机电子保护器等,并根据电动机铭牌电流调整保护装置的整定值选择。如电动机负载较稳定,为了更好地保护电动机,可按电动机的实际工作电流来调整保护装置的整定值。电动机的实际工作电流可在电动机负载运转时,用钳形电流表直接测定。
当电源的电压、频率与铭牌上的数值偏差超过5%时,电动机不能保证连续输出额定功率。连续工作的电动机不允许过载。
电动机空载或负载运行不应有断续的或异常的声响或振动,轴承温度不应过高。
字母含义:
J——异步电动机; O——封闭; L——铝线缠组;
W——户外; Z——冶金起重; Q——高起动转轮;
D——多速; B——防爆; R一绕线式;
S——双鼠笼; K一—高速; H——高转差率。
2基本结构
三相异步电动机由固定的定子和旋转的转子两个基本部分组成,转子装在定子内腔里,借助轴承被支撑在两个端盖上。为了保证转子能在定子内自由转动,定子和转子之间必须有一间隙,称为气隙。电动机的气隙是一个非常重要的参数,其大小及对称性等对电动机的性能有很大影响。图2所示为三相笼型异步电动机的组成部件。
[1]
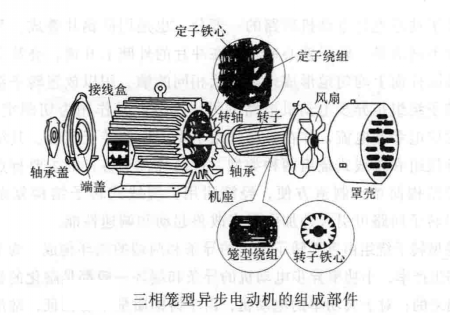 图2
图2
3故障处理
绕组是电动机的组成部分,老化、受潮、受热、受侵蚀、异物侵入、外力的冲击都会造成对绕组的伤害,电机过载、欠电压、过电压,缺相运行也能引起绕组故障。绕组故障一般分为绕组接地、短路、开路、接线错误。如今分别说明故障现象、产生的原因及检查方法。
4分类形式
一、按电动机结构尺寸分类
①大型电动机指电动机机座中心高度大于630mm,或者16号机座及以上.或定子铁芯外径大于990mm者.称为大型电动机。
②中型电动机指电动机机座中心高度在355一630mm之间.或者11-15号机座.或定子铁芯外径在560~990mm之间者.称为中型电动机。
③小型电动机指电动机机座中心高度在80-315mm.或者10号及以下机座,或定子铁芯外径在125-560mm之间者.称为小型电动机。
二、按电动机转速分类
①恒转速电动机有普通笼型、特殊笼型(深槽式、双笼式、高启动转矩式)和绕线型。
②调速电机就是配有有换向器的电动机。一般采用三相并励式的绕线转子电动机(转子控制电阻、转子控制励磁)。
③变速电动机有变极电动机、单绕组多速电动机、特殊笼型电动机和转差电动机等。
三、按机械特性分类
①普通笼型异步电动机适用于小容量、转差率变化小的恒速运行的场所.如鼓风机、离心泵、车床等低启动转矩和恒负载的场合。
②深槽笼型适用于中等容量、启动转矩比井通笼型异步电动机稍大的场所。
③双笼型异步电动机适用于中、大型笼型转子电动机.启动转矩较大.但最大转矩稍小。适用于传送带、压缩机、粉碎机、搅拌机、往复泵等需要启动转矩较大的恒速负载上。
④特殊双笼型异步电动机采用高阻抗导体材料制成。特点是启动转矩大.最大转矩小,转差率较大.可实现转速调节。适用于冲床、切断机等设备。
⑤绕线转子异步电动机适用于启动转矩大、启动电流小的场所,如传送带、压缩机、压延机等设备。
四、按电动机防护形式分类
①开启式电动机除必要的支承结构外,对于转动及带电部分没有专门的保护。
②防护式电动机内转动和带电部分有必要的机械保护.但不明显地妨碍通风。按其通风口防护结构不同。有下列三种:网罩式、防滴式、防溅式。防滴式与防溅式不同,防滴式是能防止垂直下落的固体或液体进入电动机内部,而防溅式是能防止与垂线成1000角范围内任何方向的液体或固体进入电动机内部。
③封闭式电动机机壳结构能够阻止壳内外空气自由交换.但并不要求完全密封。
④防水式电动机机壳结构能够阻止具有一定压力的水进入电动机内部。
⑤水密式当电动机浸没在水中时.电动机机壳的结构能够阻止水进入电动机内部。
⑥潜水式电动机在规定的水压下,能长期在水中运行。
⑦隔爆式电动机机壳的结构能阻止电动机内部的气体爆炸传递到电动机外部.而引起电动机外部的燃烧性气体的爆炸。
五、按电动机使用环境分类
可分为普通型、湿热型、干热型、船用型、化工型、高原型和户外型。
5调速方式
6铭牌数据
三相异步电动机的铭牌数据包括以下几项。
(1)额定功率PN:额定运行状态下的轴上输出机械功率,kW。
(2)额定电压UN:额定运行状态下加在定子绕组上的线电压,V或kV。
(3)额定电流IN:额定电压下电动机输出额定功率时定子绕组的线电流,A。
对额定电流,还可以采用如下经验公式进行估算:
式中:功率的单位为kW,电压的单位为V。
(4)额定转速nN:电动机在额定输出功率、额定电压和额定频率下的转速,r/min。
(5)额定频率fN:电动机电源电压标准频率。我国工业电网标准频率为50 Hz。
三相交流电动机轴上额定输出功率与输人电功率的关系为:
式中:cosθN是电动机在额定运行状态下定子侧的功率因数;ηN为额定运行状态下电动机的效率。
此外,绕线转子异步电动机还标有转子额定电势和转子额定电流。前者系指定子绕组加额定电压、转子绕组开路时两集电环之间的电势(线电势);后者系指定子电流为额定值时转子绕组的线电流。
[2]
7相关问题
1、什么故障可以造成电机(电球)组启动马达传动齿轮打齿的事故?
答:蓄电池电力不足蓄电池温度过高; 启动电机继电器不工作 ;启动马达传动齿轮与飞轮齿圈不能啮合; 启动电机进入啮合柴油机不能转动或转动无力; 启动电机不转; 启动失效; 柴油机运转后和启动电机不能分离;
2、AVR损坏的主要原因是什么?
答:AVR电路由整流主回路,电压检测电路,比较控制电路三个部分组成;排除原有电气元件本身质量上的原因造成损坏的可能性而言,在整块AVR电路中,主回路和比较控制电路的工作频率变动最大;其中主回路的整流桥和比较电路中的晶体管变动更频,其损坏比例占整块AVR损坏率的90%以上;鉴于进口发电机上的AVR属于非拆修配件,损坏了就要换新的,所以,我们主要分析造成发电机上的AVR损坏的原因,尽可能避免AVR的损坏是最重要的,只要使用适当,可以提高AVR的使用寿命。发电机电压越稳定,AVR内的变动频率越小;比较电路中的晶体管的开关动作越小,AVR损坏的几率越小;输出负载相对平稳,AVR内的变动频率越小,比较电路中的晶体管的开关动作越小,AVR损坏的几率越小;柴油机的转速越稳定,变化电流对AVR的振荡冲击越小;经常性的“游车”和超负载,三相负载相差太大是造成AVR损坏的最主要原因;选择带E、F、C燃油系统的发电机组,由于频率变动小,AVR的使用会更可靠。
3、两台发电机组并机使用的条件是什么?用什么装置来完成并机工作?
答:并机使用的条件是两台机瞬间的电压、频率、相位相同。俗称“三同时”。用专用并机装置来完成并机工作。一般建议采用全自动并机柜。尽量不用手动并机。因为手动并机的成功或失败取决于人为经验。笔者以20多年从事电力工作的经验斗胆放言,柴油发电机手动并机的可靠成功率等于0。决不能以市电大电源系统可用手动并机的概念来套用小电源系统,因为二者的保护等级是完全不一样的。


