






 编辑
编辑1构造
2分类
3性能相关
直流电动机的性能与它的励磁方式密切相关,通常直流电动机的励磁方式有4种:直流他励电动机、直流并励电动机、直流串励电动机和直流复励电动机。掌握4种方式各自的特点
:
1.直流他励电动机: 励磁绕组与电枢没有电的联系,励磁电路是由另外直流电源供给的。因此励磁电流不受电枢端电压或电枢电流的影响。
2.直流并励电动机: 电路并联,分流,并励绕组两端电压就是电枢两端电压,但是励磁
绕组用细导线绕成,其匝数很多,因此具有较大的电阻,使得通过他的励磁电流较小。
3.直流串励电动机:电流串联,分压,励磁绕组是和电枢串联的,所以这种电动机内磁场随着电枢电流的改变有显著的变化。为了使励磁绕组中不致引起大的损耗和电压降,励磁绕组的电阻越小越好,所以直流串励电动机通常用较粗的导线绕成,他的匝数较少。
4.直流复励电动机:电动机的磁通由两个绕组内的励磁电流产生。
4起动
由于电机电枢回路电阻和电感都较小,而转动体具有一定的机械惯性,因此当电机接通电源后,起动的开始阶段电枢转速以及相应的反电动势很小,起动电流很大。最大可达额定电流的15~20倍。这一电流会使电网受到扰动、机组受到机械冲击、换向器发生火花。因此直接合闸起动只适用于功率不大于4千瓦的电动机(起动电流为额定电流的6~8倍)
[2]
。
为了限制起动电流,常在电枢回路内串入专门设计的可变电阻,其原理接线见图1。在起动过程中随着转速的不断升高及时逐级将各分段电阻短接,使起动电流限制在某一允许值以内。这种
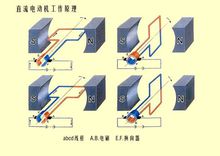 直流电动机工作原理
起动方法称为串电阻起动,非常简单,设备轻便,广泛应用于各种中小型直流电动机中。但由于起动过程中能量消耗大,不适于经常起动的电机和中、大型直流电动机。但对于某些特殊需要,例如城市电车虽经常起动,为了简化设备,减轻重量和操作维修方便,通常采用串电阻起动方法。
直流电动机工作原理
起动方法称为串电阻起动,非常简单,设备轻便,广泛应用于各种中小型直流电动机中。但由于起动过程中能量消耗大,不适于经常起动的电机和中、大型直流电动机。但对于某些特殊需要,例如城市电车虽经常起动,为了简化设备,减轻重量和操作维修方便,通常采用串电阻起动方法。
直流电动机工作原理
对容量较大的直流电动机,通常采用降电压起动。即由单独的可调压直流电源对电机电枢供电,控制电源电压既可使电机平滑起动,又能实现调速。此种方法电源设备比较复杂。
5机械特性
电动机的转速n随转矩T而变化的特性【n=f(T)】称为机械特性。它是选用电动机的一个重要依据。各类电动机都因有自己的机械特性而适用于不同的场合。几种直流电动机的机械特性见图2
[2]
。
调速 从直流电动机的电枢回路看,电源电压U与电动机的反电动势Ed和电枢电流Id在电枢回路电阻Rd上的电压降必须平衡。即U=Ed+IdRd
反电动势又与电动机的转速n和磁通φ有关,电枢电流又与机械转矩M和磁通φ有关。即 z4系列直流电动机
Ed=Cφn
M=CφId式中C
为常数。由此可得式中n0为空载转速,k 为Rа/C2。以上是未考虑铁心饱和等因素时的理想关系,但对实际直流电动机的分析也有指导意义。由上可见直流电动机有3种调速方法:调节励磁电流、调节电枢端电压和调节串入电枢回路的电阻。调节电枢回路串联电阻的办法比较简便,但能耗较大;
 z4系列直流电动机
z4系列直流电动机
6控制结构
直流无刷电机的控制结构,直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(P)影响,N=120.f / P。在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。直流无刷电机即是将同步电机加上电子式控制(驱动器),
控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。也就是说直流无刷电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
直流无刷驱动器包括电源部及控制部:电源部提供三相电源给电机,控制部则依需求转换输入电源频率。电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。换流器(inverter)一般由6个功率晶体管(Q1~Q6)分为上臂(Q1、Q3、Q5)/下臂(Q2、Q4、Q6)连接电机作为控制流经电机线圈的开关。控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器(inverter)换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器(hall-sensor),作为速度之闭回路控制,同时也做为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。
7控制原理
直流无刷电机的控制原理,要让电机转动起来,首先控制部就必须根据hall-sensor感应到的电机转子所在位置,然后依照定子绕线决定开启(或关闭)换流器(inverter)中功率晶体管的顺序,inverter中之AH、BH、CH(这些称为上臂功率晶体管)及AL、BL、CL(这些称为下
 直流无刷电机
直流无刷电机
基本上功率晶体管的开法可举例如下:AH、BL一组→AH、CL一组→BH、CL一组→BH、AL一组→CH、AL一组→CH、BL一组,但绝不能开成AH、AL或BH、BL或CH、CL。此外因为电子零件总有开关的响应时间,所以功率晶体管在关与开的交错时间要将零件的响应时间考虑进去,否则当上臂(或下臂)尚未完全关闭,下臂(或上臂)就已开启,结果就造成上、下臂短路而使功率晶体管烧毁。
当电机转动起来,控制部会再根据驱动器设定的速度及加/减速率所组成的命令(Command)与hall-sensor信号变化的速度加以比对(或由软件运算)再来决定由下一组(AH、BL或AH、CL或BH、CL或……)开关导通,以及导通时间长短。速度不够则开长,速度过头则减短,此部份工作就由PWM来完成。PWM是决定电机转速快或慢的方式,如何产生这样的PWM才是要达到较精准速度控制的核心
[4]
。
高转速的速度控制必须考虑到系统的CLOCK 分辨率是否足以掌握处理软件指令的时间,另外对于hall-sensor信号变化的资料存取方式也影响到处理器效能与判定正确性、
 直流无刷电机
实时性。至于低转速的速度控制尤其是低速起动则因为回传的hall-sensor信号变化变得更慢,怎样撷取信号方式、处理时机以及根据电机特性适当配置控制参数值就显得非常重要。或者速度回传改变以encoder变化为参考,使信号分辨率增加以期得到更佳的控制。电机能够运转顺畅而且响应良好,P.I.D.控制的恰当与否也无法忽视。之前提到直流无刷电机是闭回路控制,因此回授信号就等于是告诉控制部电机转速距离目标速度还差多少,这就是误差(Error)。知道了误差自然就要补偿,方式有传统的工程控制如P.I.D.控制。但控制的状态及环境其实是复杂多变的,若要控制的坚固耐用则要考虑的因素恐怕不是传统的工程控制能完全掌握,所以模糊控制、专家系统及神经网络也将被纳入成为智能型P.I.D.控制的重要理论。
直流无刷电机
实时性。至于低转速的速度控制尤其是低速起动则因为回传的hall-sensor信号变化变得更慢,怎样撷取信号方式、处理时机以及根据电机特性适当配置控制参数值就显得非常重要。或者速度回传改变以encoder变化为参考,使信号分辨率增加以期得到更佳的控制。电机能够运转顺畅而且响应良好,P.I.D.控制的恰当与否也无法忽视。之前提到直流无刷电机是闭回路控制,因此回授信号就等于是告诉控制部电机转速距离目标速度还差多少,这就是误差(Error)。知道了误差自然就要补偿,方式有传统的工程控制如P.I.D.控制。但控制的状态及环境其实是复杂多变的,若要控制的坚固耐用则要考虑的因素恐怕不是传统的工程控制能完全掌握,所以模糊控制、专家系统及神经网络也将被纳入成为智能型P.I.D.控制的重要理论。
直流无刷电机
8直流电动机的额定值
1.额定功率PN: 电机轴上输出的机械功率
。
2.额定电压UN : 额定工作情况下的电枢上加的直流电压。(例:110V,220V,440V)
3.额定电流IN : 额定电压下轴上输出额定功率时的电流
(并励包括励磁和电枢电流)。
额定转速nN: 在PN , UN , IN 时的转速。
4.直流电机的转速一般在500r/min 以上。特殊的直流电机转速可以做到很低(如每分钟几转)或很高(每分钟3000转以上)。
注意: 调速时对于没有调速要求的电机,最大转速不能超过1.2nN。
9直流电动机特性类型的选择
(1) 恒转矩的生产机械(TL一定,和转速无关)要选硬特性的电动机,如:金属加工、起重机械等
。
(2) 通风机械负载,机械负载 TL 和转速 n 的平方成正比。这类机械也要选硬特性的电动机拖动。
(3) 恒功率负载(P 一定时,T和n 成反比),要选 软特性电机拖动。如:电气机车等。
10改变直流电动机转动方向
改变直流电动机转动方向的方法有两种
:
.
.
一是电枢反接法,即保持励磁绕组的端电压极性不变,通过改变电枢绕组端电压的极性使电动机反转;
二是励磁绕组反接法,即保持电枢绕组端电压的极性不变,通过改变励磁绕组端电压的极性使电动机调向。当两者的电压极性同时改变时,则电动机的旋转方向不变。
他励和并励直流电动机一般采用电枢反接法来实现正反转。他励和并励直流电动机不宜采用励磁绕组反接法实现正反转的原因是因为励磁绕组匝数较多,电感量较大。当励磁绕组反接时,在励磁绕组中便会产生很大的感生电动势.这将会损坏闸刀和励磁绕组的绝缘。
串励直流电动机宜采用励磁绕组反接法实现正反转的原因是因为串励直流电动机的电枢两端电压较高,而励磁绕组两端电压很低,反接容易,电动机车常采用此法。


