






 编辑
编辑1组成结构
全机方框图如图3-3所示,主要组成部分有:激光器,光学系统(包括发射望远镜、瞄准望远镜、接收望远镜和导光器等),光电转换系统,计数显示系统和电源电路。
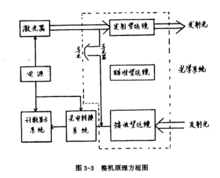 整机原理方框图
整机原理方框图
激光器是全机主要部分,它产生波长为6943A的大功率单脉冲,作为探测目标的光源。
光学系统中的瞄准望远镜是用来瞄准被测目标的。发射望远镜是为了紧缩激光光束的发散角并把激光射向目标。接收望远镜是为了提高灵敏度,并把激光从目标反射回来的回波接收到。导光器是取发射激光的一小部分作为测量距离时,打开数字显示系统中的。“电子表”的起始脉冲。
光电转换系统是将导光器取到的发射激光的一小部分光和从接收望远镜接收来的目标反射光转换成电信号并加以放大。
[2]
计数显示系统是全机控制中心,它除了担负测量激光脉冲的往返时间并自动换算成单位为米的距离数字予以显示外,还担负着全机的协调工作。
[2]
电源部分是提供给激光器、光电转换系统、数字显示器等所需要的电流和电压。
2原理
探测方式分为垂直探测和扫描探测两种。探测原理是:激光器对准云底发射脉冲光束,接收来自云滴对激光产生的后向散射光;根据从发射激光脉冲到接收到回波信号的时间和激光束的仰角,算出云底高度。如果激光光束穿透云层后 能量尚未衰减殆尽,再遇到第二层甚至第三层云时,仍可测到云滴的后向散射光信号,从而测得云的层次和厚度。由于这种回波信号较弱,测得的云的层次和厚度有时误差较大。激光测云仪也可用来研究激光束在云中的衰减情况。
3测距过程
测距的整个过程是:用瞄准望远镜瞄准被测的目标,启动电源,当激光器发出单个脉冲激光后,其中一小部分激光从导光器到光电转换系统,把光脉冲变成电脉冲,并加以放大,此电脉冲到计数显示系统打开“电子表”,而激光器发出单个脉冲激光的大部分能量由发射望远镜发射出去,到达目标后,被反射回一小部分,由接收望远镜接收到并经光电转换系统把这反射回来的光脉冲变成电脉冲加以放大,再到计数显示系统关闭“电子表”,这时“电子表”所指示出来的数字就是所测目标的距离。
4特点


